MY-JX挖、推、機械手、小車運動、四驅機械手模型
MY-JXA 挖土機實訓模型
集PLC技術、微機控制技術與一體,即有形像的模型,又有生動具體的運轉機構,實驗操作方便,是各院校可編程控制器技術進行實物實驗的理想模型。
MY-JXB 推土機實訓模型
集PLC技術、微機控制技術與一體,即有形像的模型,又有生動具體的運轉機構,實驗操作方便,是各院校可編程控制器技術進行實物實驗的理想模型。
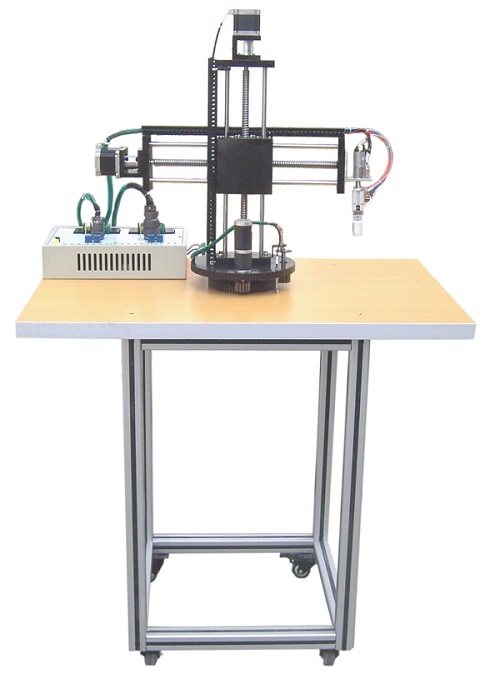
MY-JXC 機械手實訓模型
一、組成及特點:
1、機械手實驗裝置由底座、旋轉底座、氣動部分、三維(X、Y、Z)運動機械及電氣控制等四部分組成。氣動部分由電磁閥和氣缸組成。三維運動機械部分是一個采用滾珠絲杠傳動的齒輪傳動相結合的模塊化結構,用于實現定位功能。
2、電氣控制由三菱可編程控制器(PLC自備),步進電機驅動器、電源、傳感器等組成。
3、通過傳感器信號采集,PLC編程,實現對步進電機、直流電機、電磁閥進行較復雜的位置控制、時序邏輯控制及開關控制等功能。
4、能完成PLC主機網絡及MCGS工控組態棒圖動態跟蹤實驗教學。
二、通過編程,可實現如下實驗功能
開機復位、橫軸前伸/縮回、豎軸上升/下降、底盤旋轉、手旋轉、手張開/夾緊,通過編程,使上述功能按一定順序排列即可完成將一定范圍內的物品轉運到指定位置。
通過PLC控制,實現機械手的真實工作狀況。
友情提示:
1、設備驗收:各采購單位收貨時請檢查挖、推、機械手、小車運動、四驅機械手模型的貨品外觀,核實本模型的數量及配件,拒收處于受損狀態的挖、推、機械手、小車運動、四驅機械手模型;
2、設備質保:茂育將為各采購單位提供挖、推、機械手、小車運動、四驅機械手模型產品說明書內的質保條件和質保期,在質保范圍內提供對本模型的免費維修,超出條件承諾時提供對本模型的有償維修;
3、設備退換貨:各采購單位單方面原因導致的挖、推、機械手、小車運動、四驅機械手模型選型錯誤或購買本模型的數量錯誤,造成本模型的退換貨要求,將不被接受;
4、設備貨期:挖、推、機械手、小車運動、四驅機械手模型的發貨期為參考值,如您需要了解本模型的精確貨期,請與茂育的銷售人員聯系;
5、如各采購單位對挖、推、機械手、小車運動、四驅機械手模型有任何疑問,請致電:021-56311657 ,我們將由專業技術人員為您提供有關本模型的技術咨詢。





 品牌理念
品牌理念  標準流程
標準流程  有效溝通
有效溝通 專業管理
專業管理 優秀團隊
優秀團隊 品質保證
品質保證 無憂售后
無憂售后